
Roboticist with a strong focus on Machine Learning
My research focusses on the combination of decision theory and machine learning, motivated by applications in robotics. The goal are learning robotic systems that are able to reason about their own state of knowledge (based on visual and tactile perception) and decide which actions might yield the most informative future data, make them learn even better and solve problems.



Doctorate
Master of Science
Bachelor of Science
Co-Founder @ Sereact
At Sereact we built an adaptable AI to bring a new era of intelligent robots to commercial viability. We unleash the power of AI to enable our customers to close automation gaps and reach a new level of cost-efficiency.
AI Researcher
In my doctoral studies, I focus on simulation-based policy learning of robot manipulations and depolyment on real robot systems. For this purpose Reinforcement Learning algorithms are approched. To guarantee compact environmental representations based on sensor data a computer vision pipeline is developed.
Intern & Thesis Student
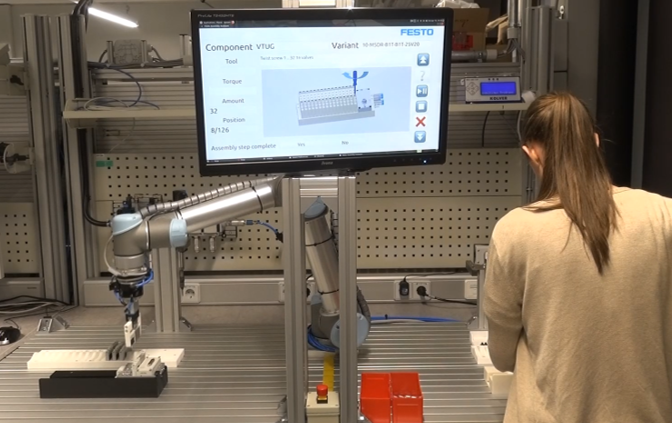
During my time as an industrial intern at Festo AG, I researched hybrid and cooperative robotic assembly systems. A flexible task planner for the computation of optimal task sequence and task allocation in collaborative human-robot teams was introduced.
Student Research Assistant
As a Student Research Assistant at the Institute for Control Engineering I developed a robot control architecture in ROS. Furthermore I implemented controllers for sensor-supported robot tasks (e.g. visual servoing).
Robotics
* Task Panning
* Kinematics and Dynamics
Machine Learning
* Decision Theory
Computer Vision
* Object-Localisation
* Segmentation



Gulde, Ralf; Tuscher, Marc; Csiszar, Akos.; Riedel, Oliver; Verl, Alexander;
Reinforcement Learning Approach to Vibration Compensation for Dynamic Feed Drive Systems. In 2019 Second International Conference on Artificial Intelligence for Industries (AI4I) (pp. 26-29). IEEE.
Gulde, Ralf; Tuscher, Marc; Csiszar, Akos.; Riedel, Oliver; Verl, Alexander;
Deep Reinforcement Learning using Cyclical Learning Rates . In 2020 Third International Conference on Artificial Intelligence for Industries (AI4I) . IEEE.
Friedrich, Christian, Gulde, Ralf; Lechler, Armin; Verl, Alexander:
"Maintenance Automation: Methods for Robotics Manipulation Planning and Execution" In: IEEE Transactions on Automation Science and Engineering (2022)., 2022